服务热线
400-9655-321
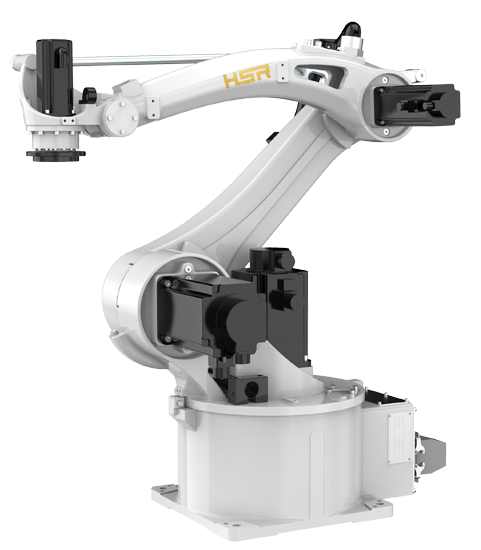
HSR-MD410-1500工业机器人为一款4轴串联多关节机器人,有效负载10kg,重复定位精度±0.08mm,最大工作半径1510mm,具有精度高、运行速度快、维护方便等诸多优势,可广泛应用于冲压上下料、搬运、拆垛、码垛等领域。
运动速度快
冲压节拍可高达16次/分,有效提升生产效率。
运动范围大
最大工作半径可达1510mm,可轻松应用于冲床中心距3m的冲压场合。
高性价比
与6关节机器人对比,该机型采用4关节设计,有效降低投入成本,并可满足各类搬运应用,
便捷维护
该款机器人结构简单,采用模块化部件结构,组合式减速机构,故障维修难度低,可快速故障处理立即恢复生产;
高可靠性
整机采用高性能核心零部件,稳定性、故障率低,为整机提供高可靠性能保证,可长时间持续执行生产任务;
通用性能强
可广泛适用于各类行业领域的搬运,如热锻、冲压上下料行业;
拓展性强
可根据实际生产需要,灵活布置和调整生产连线方式,可快速实现柔性化生产及后续方案更改设计及拓展应用;
| 工业机器人 | HSR-MD410-1500 | |
|---|---|---|
| 自由度 | 4 | |
| 最大负载 | 10Kg | |
| 最大运动半径 | 1510mm | |
| 重复定位精度 | ±0.08mm | |
| 运动范围 | J1 | ±170° |
| J2 | -140°/0° | |
| J3 | -30°/155° | |
| J4 | ±360° | |
| 最高速度 | J1 | 379°/s,6.61rad/s |
| J2 | 379°/s,6.61rad/s | |
| J3 | 267°/s,4.66rad/s | |
| J4 | 578°/s,10.09rad/s | |
| 容许惯性矩 | J4 | 0.25kg㎡ |
| 容许负荷扭矩 | J4 | 42NM |
| 适用环境 | 温度 | 0°C-45°C |
| 湿度 | 20%-80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 模拟量 IO 输入:2 路,模拟量 IO 输 出:2 路 高速 IO 输入:2 路,高速 IO 输出:2 路 数字 IO 输入:32 路,数字 IO 输出:32 路 | |
| 本体预留信号线 | 12位(航空插头接线方式:焊接) | |
| 预留气路 | 2*Φ8 | |
| 电源容量 | 4kVA | |
| 额定功率 | 3.2kW | |
| 额定电压 | 3.2kW/单相AC220V/17A | |
| 额定电流 | 17A | |
| 本体防护等级 | IP54 | |
| 安装方式 | 地面安装 | |
| 本体重量 | 140kg | |
| 控制柜防护等级 | IP20 | |
| 控制柜重量 | 12kg | |




PRODUCT RECOMMENDATION
HOT NEWS
售前热线:400-9655-321
重庆公司:400-6007-826


![[V1.6.10]拉斯维加斯机器人操作与编程说明书v0.2.2.zip](static/picture/202012161102525900.jpg)







 售前客服
售前客服
